
Overworld
Assessing the geometry of the world for Human-Robot Interaction

For a robot to interact with humans in a given environment, a key need is to understand its environment in terms of the objects composing it, the other agents acting in it, and the relations between all of them.
Overworld is a lightweight and open-source framework, merging the key features of a decade of research on situation assessement. It permanently maintains a geometric state of the world from the point of view of the robot by aggregating perceptual information from several sources and reasoning on them to create a coherent world. Overworld also implements perspective-taking by emulating the humans' ability to perceive to estimate the state of the world from their perspective. Finally, thanks to a strong link with the Ontologenius ontology framework, it ensures knowledge coherence in the whole robotic architecture.

Overworld has leveled up, ditching the Bullet engine for a custom rendering engine and PhysX-powered simulation!
Thanks to these upgrades, Overworld delivers a massive performance boost!
With a better rendering, a more refined simulation, and an improved configuration, welcome to Overworld 0.2.0. And we're just getting started!
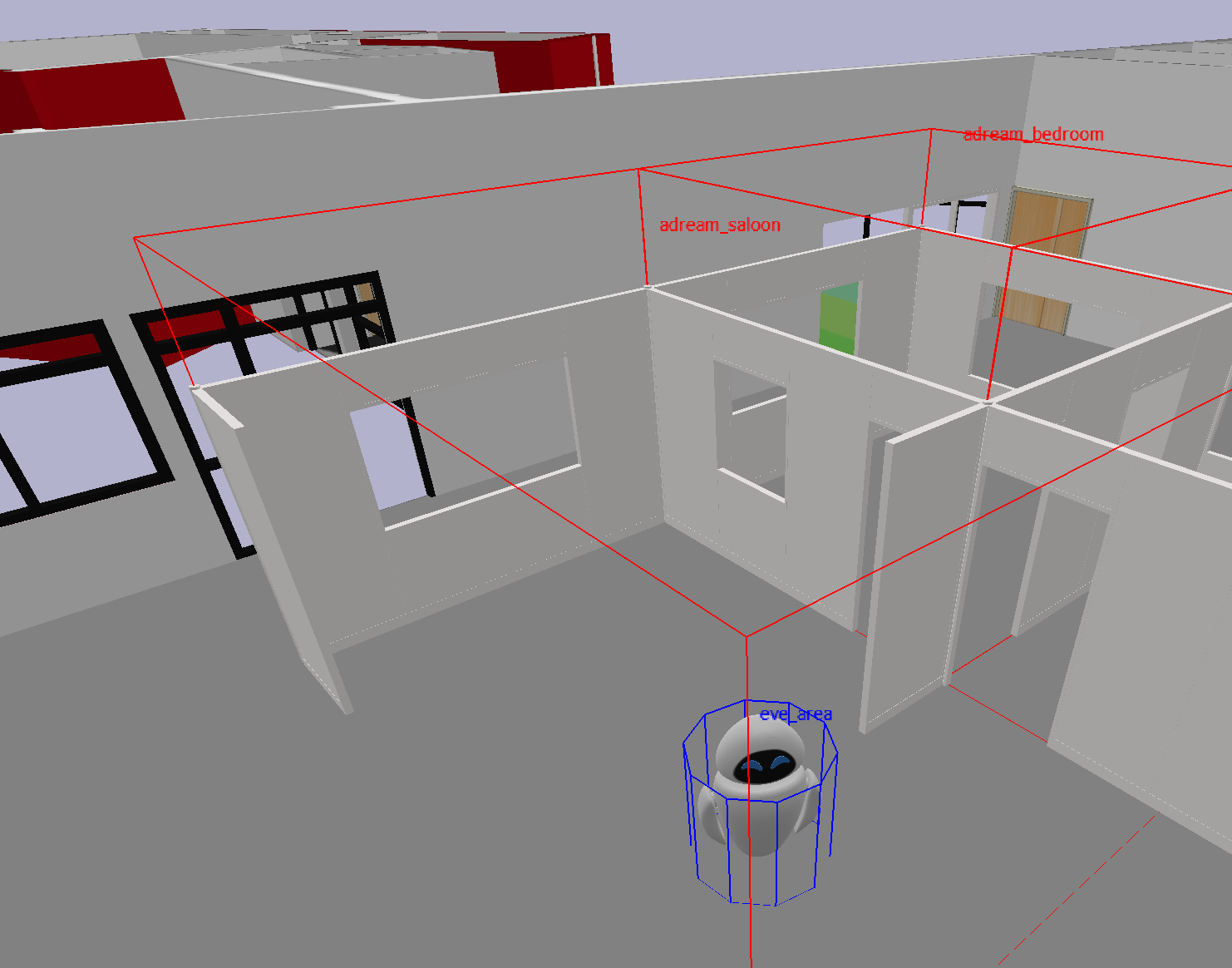
From Overworld 0.1.5 you can now define areas in the form of polygons and cylinders.
Static or attached to other entities, Overworld will allow you to know the entities in them with a newly introduced semantic fact!
Being implemented using perception modules you can adapt it to your need and even perceive them dynamically.
Overworld now comes with more parameters allowing you to adjust its setting to your specific use.
You want to desactivate the physics simulation? You want to change the assessment frequency? Now you can!
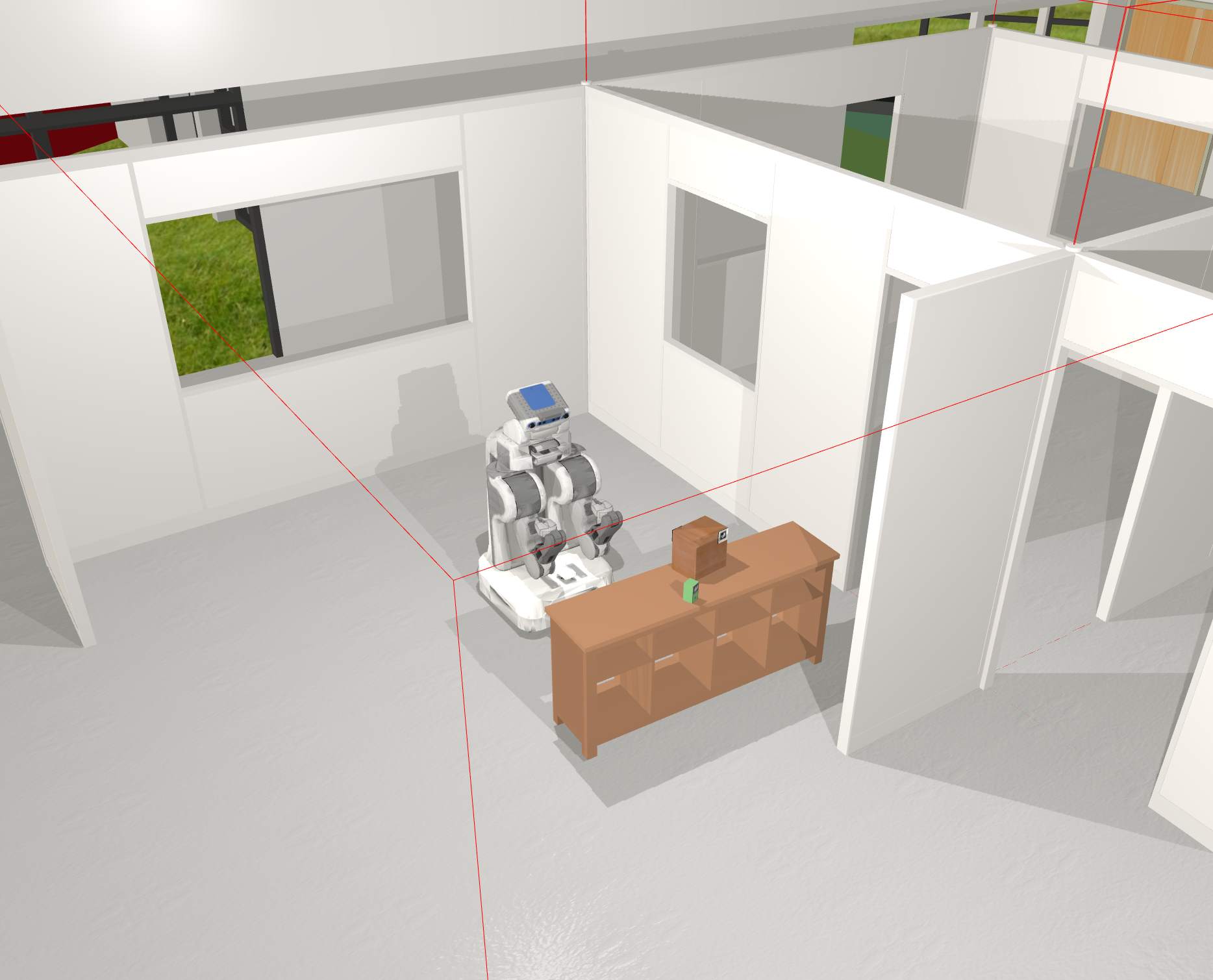
Overworld now fully uses the Bullet physics simulator implementing a new simulation-based reasoning process to estimate the position of objects which are no more perceived.
You have dropped an object in a box? Overworld understand it!
What's the use of a situation assessement software if you cannot adapt it to your specific robot? Overworld proposes a plugin system allowing you to develop your own perception modules while enjoying Overworld's reasoning capabilities.


 Ontologenius
Ontologenius